Constraint Handling in Evolutionary Algorithms 進化算法中的約束處理
Outline of Topics 主題大綱
- Motivating examples 激勵的例子
- Engineering Optimisation Problems 工程優化問題
- Constrained Optimisation 約束優化
- Constrained Handling Techniques in EAs 進化算法中的約束處理技術
- Penalty Function Approach 懲罰函數方法
- Stochastic Ranking Approach 隨機排序方法
- Feasibility Rules 可行性規則
- Repair Approach 修復方法
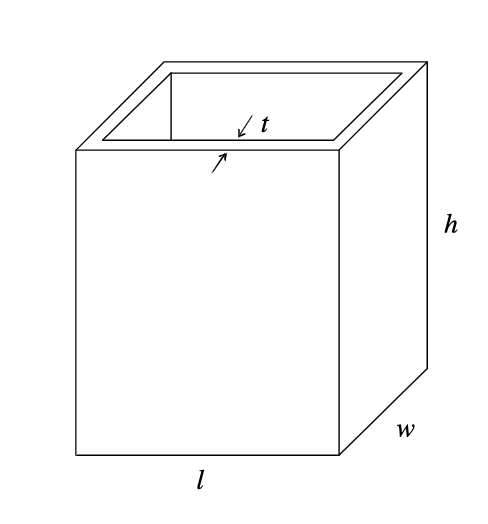
Example 1: Cubic Vessel Design 立方容器設計
- Aims: to find an optimal values of lengthl, widthw, highh, and thicknesst, to minimize the material consumption (or equivalently, the surface area). 目的:找到長度 l、寬度 w、高度和厚度的最佳值,以最大限度地減少材料消耗(或等效的表面積)。
- Constraints: material consumption cannot be minimise infinitely since there are some requirements: 材料消耗不能無限制地減少,因為有一些要求:
- Restrictions imposed by government and corporate regulations, e.g., shapes or the maximum capacity 政府和公司法規施加的限制,例如形狀或最大容量
- Quality requirements, e.g., the maximum deflection should be less than an allowable value. 質量要求,例如最大偏移量應小於允許值。
Example 2: Spring design 彈簧設計
Aims to minimize the weight of a tension/compression spring. All design variables are continuous (See my paper). 目的是減少張力/壓縮彈簧的重量。 所有設計變量都是連續的(參見我的論文)。
Four constraints: 四個約束:
- Minimum deflection 最小偏移
- Shear stress 剪切應力
- Surge frequency 漲潮頻率
- Diameters 直徑
Let the wire diameter d = x1 , the mean coil diameter D = x2 and the number of active coils N = x3 . 令線直徑 d = x1,平均線圈直徑 D = x2 和活動線圈數 N = x3。
There are boundaries of design variables: 設計變量的邊界有:
Constrained Optimisation Example: Spring design 彈簧設計
Minimize 最小化
$f(X)=(x_3+2)x_2x_1^2 $
subject to 約束為
Engineering Optimisation Problems 工程優化問題
- Engineering optimisation (Design Optimisation):to find the best combination of design variables that optimises designer's preference (design objective) and satisfies certain requirements (constraints). 工程優化(設計優化):找到最佳的設計變量組合,以最大限度地優化設計師的偏好(設計目標)並滿足某些要求(約束)。
- Design variables: A design variable is under the control of designer and could have an impact on the solution of the optimization problem 設計變量:設計變量由設計師控制,並且可能對優化問題的解決方案產生影響
- Types of design variables can be: 設計變量的類型可以是:
- Continuous 連續的
- Integer (including binary) 整數(包括二進制)
- Set of variables: designers are required to choose the design variables from a list of recommended values from design standards 變量集:設計人員需要從設計標準的推薦值列表中選擇設計變量
- Design objective: represents the desires of the designers, e.g., to maximize profit or minimize cost. 設計目標:代表設計師的意願,例如最大化利潤或最小化成本。
- Constraints: Designer's desires cannot be optimized infinitely because of 制約因素:設計者的願望不能無限優化因為
- Limited resources: e.g., budget or materials that can be used in product development. 有限的資源:例如,可以在產品開發中使用的預算或材料。
- Other restrictions: e.g., the maximum allowable weight of the product. 其他限制:例如,產品的最大允許重量。
- A design constraint is "rigid" since usually it needs to be satisfied strictly 設計約束是"剛性的",因為通常需要嚴格滿足它
- Engineering optimisation, as well many real-world optimisation problems are constrained optimisation problems 工程優化,以及許多現實世界的優化問題都是受限優化問題
What Is Constrained Optimisation? 什麼是受限優化?
The general constrained optimisation problem: 一般受限優化問題:
subject to 約束為
where x is the n dimensional vector,x= (x 1 ,x 2 ,···,xn);f(x) is the objective function;gi(x) is the inequality constraint; and hj(x) is the equality constraint. 其中 x 是 n 維向量,x =(x 1,x 2,···,xn);f(x)是目標函數;gi(x)是不等式約束; hj(x)是等式約束。
Denote the whole search space asSand the feasible space as , . 令整個搜索空間為 S,可行空間為 ,。
Note: the global optimum in might not be the same as that in . 注意: 中的全局最優可能與 中的全局最優不同。
Different Types of Constraints 不同類型的約束
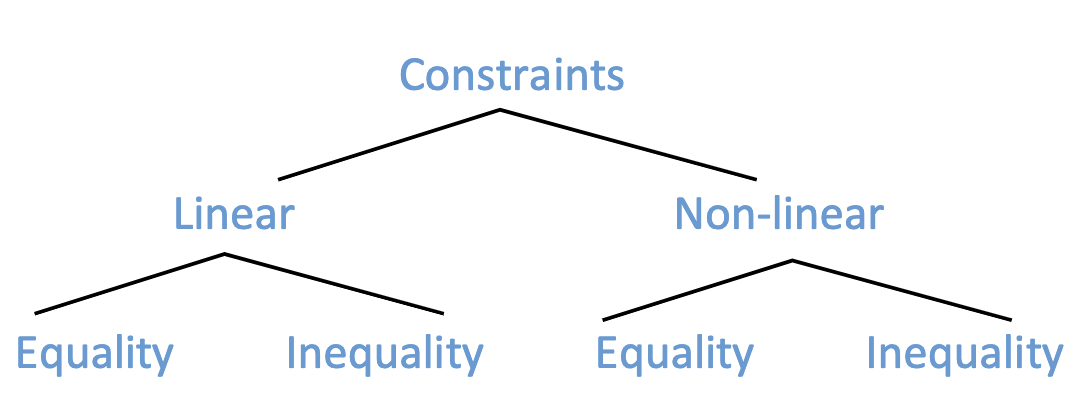
- Linear constraints are relatively easy to deal with 線性約束相對容易處理
- Non-linear constraints can be hard to deal with 非線性約束可能很難處理
Constraint Handling Techniques in Evolutionary Algorithms 進化算法中的約束處理技術
- The purist approach: rejects all infeasible solutions in search space. 純粹主義者方法:拒絕搜索空間中的所有不可行解。
- The separatist approach: considers the objective function and constraints separately. 分離主義者方法:分別考慮目標函數和約束。
- The penalty function approach: converts a constrained problem into an unconstrained one by introducing a penalty function into the objective function. 懲罰函數方法:通過在目標函數中引入懲罰函數,將受限問題轉換為無約束問題。
- The repair approach: maps (repairs) an infeasible solution into a feasible one. 修復方法:將(修復)不可行解映射為可行解。
- The hybrid approach mixes two or more different constraint handling techniques. 混合方法將兩種或更多不同的約束處理技術混合。
Penalty Function Approach: Introduction 懲罰函數方法:介紹
New Objective Function = Original Objective Function + Penalty Coefficient * Degree Of Constraint Violation 新目標函數 = 原始目標函數 + 懲罰係數 * 約束違反程度
The general form of the penalty function approach: 懲罰函數方法的一般形式:
where is the new objective function to be minimised, is the original objective function, and are penalty factors (coefficients), and and are penalty functions for inequality and equality constraints, respectively: 其中是要最小化的新目標函數,是原目標函數,和是懲罰因子(係數),G_i $和H_j$分別是不等式和等式約束的懲罰函數:
where and are usually chosen as 2. 其中 和 通常選擇為 2。
Penalty Function Approach: Techniques 懲罰函數方法:技術
- Static Penalties: The penalty function is pre-defined and fixed during evolution. 靜態懲罰:在演化過程中,懲罰函數是預定義並固定的。
- Dynamic Penalties: The penalty function changes according to a pre-defined sequence, which often depends on the generation number. 動態懲罰:懲罰函數根據預定義的序列更改,該序列通常取決於世代數。
- Adaptive and Self-Adaptive Penalties: The penalty function changes adaptively. 自適應和自適應懲罰:懲罰函數會自適應地改變。
Static Penalty Functions 靜態懲罰函數
Static penalty functions general form: 靜態懲罰函數一般形式:
where are predefined and fixed. 其中 是預定義並固定的。
Equality constraints can be converted into inequality ones: 等式約束可以轉換為不等式約束:
where is a small number. 其中 是一個小數。
Simple and easy to implement. 簡單且易於實現。
Requires rich domain knowledge to setri. 需要豐富的領域知識來設置。
can be divided into a number of different levels. When to use which is determined by a set of heuristic rules. 可以分為多個不同級別。使用哪個是由一組啟發式規則來確定的。
Dynamic Penalty Functions 動態懲罰函數
Dynamic Penalties general form: 動態懲罰一般形式:
where and are two penalty coefficients. 其中 和 是兩個懲罰係數。
General principle: the large the generation numbert, the larger the penalty coefficients and . 一般原則:世代數越大,懲罰係數 和 越大。
Question:why the large the generation number, the larger the penalty coefficients? 为什么世代數越大,懲罰係數越大?
Dynamic Penalty Functions 動態懲罰函數
- Common dynamic penalty coefficients: 常見的動態懲罰係數:
- Polynomials: where and are user-defined parameters. 多項式: 其中 和 是用戶定義的參數。
- Exponentials: , where and are user-defined parameters. 指數:, 其中 和 是用戶定義的參數。
- Hybrid: 混合:
Penalty function, Fitness Function and Selection 懲罰函數、適應函數和選擇
- Let static penalty function , where
- Question: How does affect an Evolutionary Algorithm? 如何影響演化算法?
- Minimisation problem with a penalty function 帶有懲罰函數的最小化問題
- Given two individual and , their fitness values are now determined by 考慮兩個個體 和 ,它們的適應值現在由 確定
- Because fitness values are used primarily in selection: Changing fitness changing selection probabilities 因為適應度值主要用於選擇: Changing fitness changing selection probabilities
- means
- and : has no impact on the comparison
- and : Increasing will eventually change the comparison
- and : Decreasing will eventually change the comparison
- Answer: In essence, different lead to different ranking of individual in the population 答案:本質上,不同的 導致了不同的個體在族群中的排名
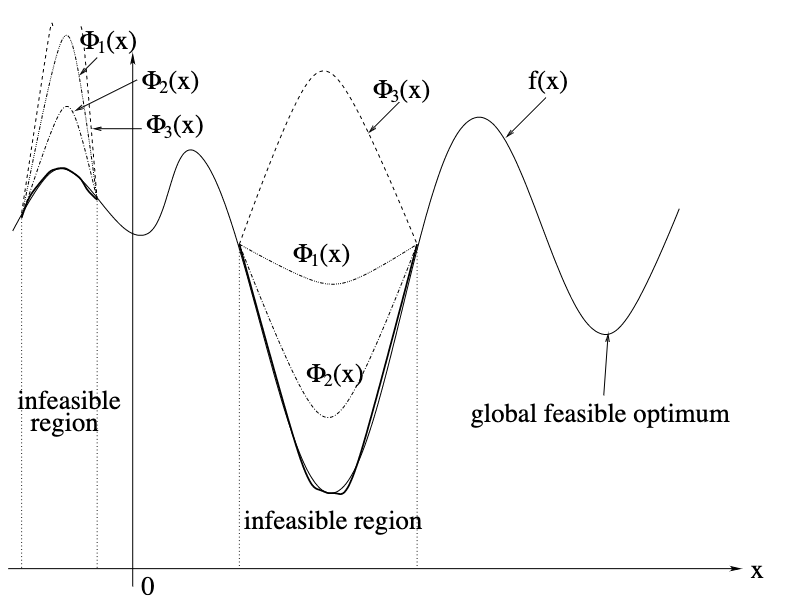
Penalties and Fitness Landscape Transformation 懲罰和適應函數的變換
- Different penalty functions lead to different new objective functions. 不同的懲罰函數導致了不同的新目標函數。
- Question: For the following minimisation problem, which penalty function should we avoid? Why? 對於以下的最小化問題,我們應該避免哪個懲罰函數?為什麼?
Penalty Functions Demystified 懲罰函數的神秘之處
- Penalty function essentially: 懲罰函數本質上:
- Transforms fitness 改變健身
- Changes rank → changes selection 改變排名 → 改變選擇
- Why not change the rank directly in an EA? 為什麼不直接在 EA 中更改排名?
- Stochastic Ranking 隨機排名
Stochastic Ranking 隨機排名
- Proposed by Dr Runarsson and Prof. Xin Yao in our school in 2000 提出者為我們學校的 Runarsson 博士和 Prof. Xin Yao
- A special rank-based selection schemethat handles constraints directly 一種特殊的基於排名的選擇方案,可直接處理約束條件
- There is no need to use any penalty functions 並不需要使用任何懲罰函數
- It's self-adaptive since there are few parameters to set 它是自適應的,因為要設置的參數很少
- Became the one of the popular constraint handling techniques due to its effectiveness and simplicity 成為了一個受歡迎的約束處理技術,因為它的有效性和簡單性
Stochastic Ranking — Self-adaptive Selection Scheme 隨機排名 — 自適應選擇方案
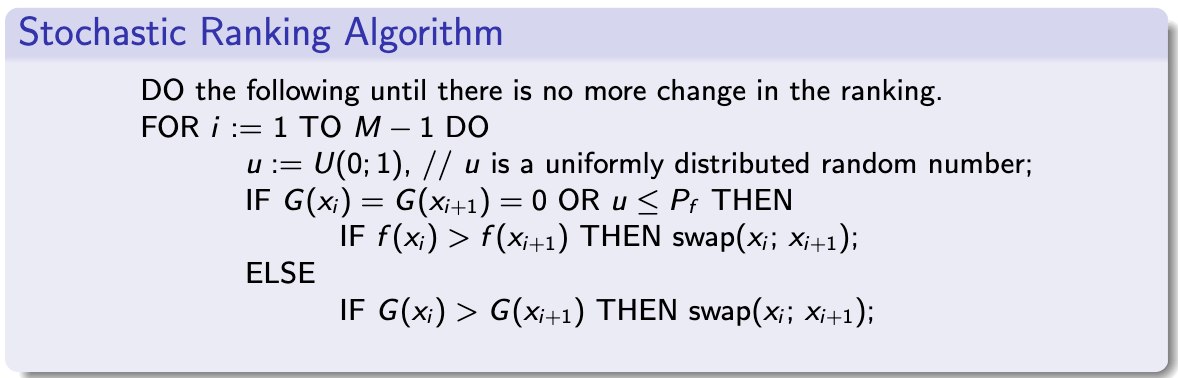
M is the number of individuals, is the sum of constraint violation and is a constant that indicates the probability of using the objective function for comparison in ranking. M 是個體的數量, 是違反約束的總和, 是一個常量,表示在排名中使用目標函數進行比較的概率。
Note: Essentially follow the bubble sort algorithm to rank the individuals. 基本上遵循 the bubble sort algorithm 來對個體進行排名。
The role of 的作用
- :
- Most comparisons are based on f(x) only 大多數比較只基於 f(x)
- Infeasible solutions are likely to occur more often, but the solutions are likely to be better 不可行的解決方案可能會更常發生,但解決方案可能會更好
- :
- Most comparisons are based on G(x) only 大多數比較只基於 G(x)
- Infeasible solutions are less like to occur, but the solutions might be poor 不可行的解決方案可能不會發生,但解決方案可能會很差
- In practice, is often set between 0.45 and 0.55 在實踐中, 通常在 0.45 和 0.55 之間
Penalty Functions Demystified 懲罰函數的神秘之處
- Penalty function essentially performs: 懲罰函數本質上執行:
- Fitness transformation 健身轉換
- Rank change selection change 排名更改 選擇更改
- Why not change selection directly in an EA? 為什麼不直接在 EA 中更改選擇?
Feasibility rule 可行性規則
- Proposed by Deb in 2000 提出者為 Deb 博士
- Based on (binary) tournament selection 基於 (binary) 比賽選擇
- After randomly choose individuals to form a tournament, apply the following rules: 隨機選擇 個體形成一個比賽後,應用以下規則:
- Between 2 feasible solutions, the one with better fitness value wins 在 2 個可行的解決方案之間,具有更好的適應值的解決方案勝出
- Between a feasible and an infeasible solutions, the feasible one wins 在 2 個可行的解決方案之間,具有更好的適應值的解決方案勝出 在一個可行的解決方案和一個不可行的解決方案之間,可行的解決方案勝出
- Between 2 infeasible solutions, the one with lowest wins 在 2 個不可行的解決方案之間, 最低的解決方案勝出
- Pros: simple and parameter free 優點:簡單且無參數
- Cons: premature convergence 缺點:過早收斂
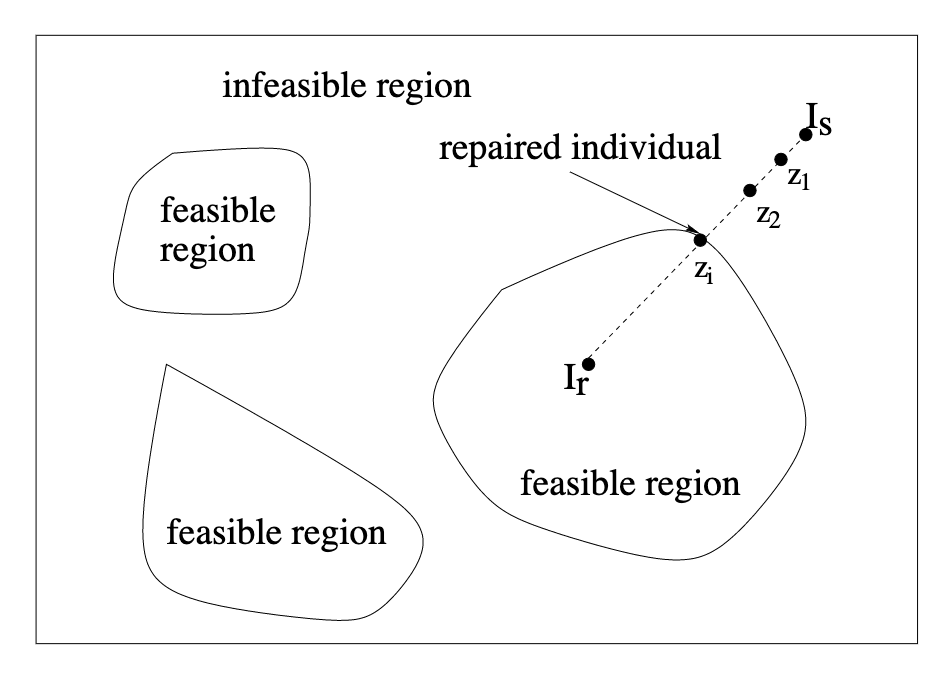
Repair Approach to Constraint Handling 修復方法來處理約束
Instead of modifying an EA or fitness function, infeasible individuals can be "repaired" into feasible ones. 除了修改 EA 或適應函數,不可行的個體可以被「修復」為可行的個體。
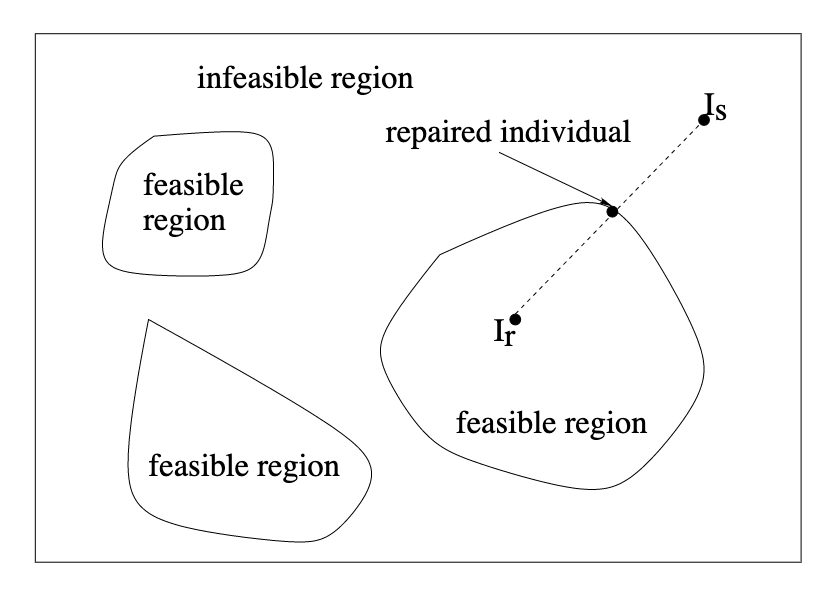
Repairing Infeasible Individuals 修復不可行的個體
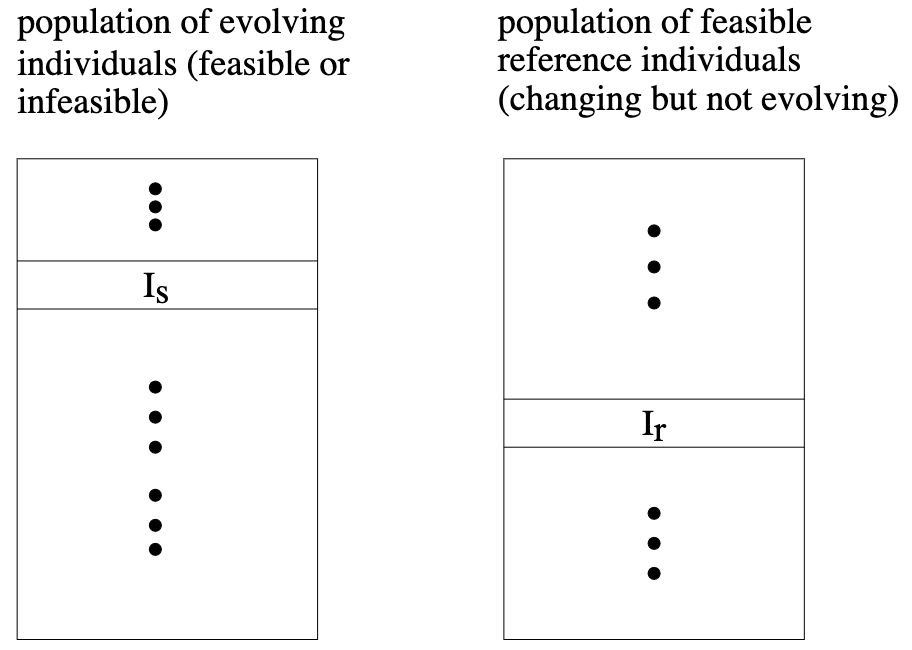
- Let Is be an infeasible individual and Ira feasible individual 讓 Is 是一個不可行的個體,Ira 可行的個體
- We maintain two populations of individuals: 我們維護兩個個體的人口:
Repairing Algorithm 修復算法
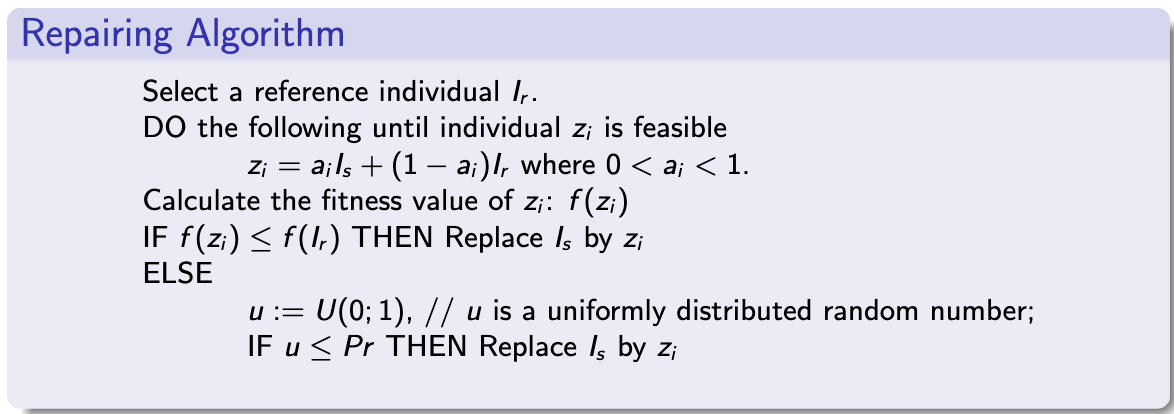
Repairing Infeasible Individuals (cont.) 修復不可行的個體(繼續)
Let be an infeasible individual and a feasible individual. 設 為不可行個體, 為可行個體。
Repairing Algorithm: Implementation Issues 修復算法:實現問題
- How to find initial reference individuals? 如何找到初始參考個體?
- Preliminary exploration 初步探索
- Human knowledge 人類知識
- How to select 如何選擇
- Uniformly at random 均勻隨機
- According to the fitness of 根據 的適應值
- According to the distance between and 根據 和 之間的距離
- How to determine 如何確定
- Uniformly at random between 0 and 1 均勻隨機在 0 和 1 之間
- Using a fixed sequence, e.g., , ,··· 使用固定序列,例如,,,···
- How to choose : A small number, usually < 0.5. 如何選擇 :一個小數,通常 < 0.5。
Conclusion 結論
- Adding a penalty term to the objective function is equivalent to changing the fitness function, which is in turn equivalent to changing selection probabilities. 在目標函數中加入懲罰項相當於改變適應度函數,進而相當於改變選擇概率。
- It is easier and more effective to change the selection probabilities directly and explicitly: stochastic ranking and feasibility rules are two examples. 直接並明確地更改選擇概率更容易且更有效:隨機排序和可行性規則是兩個例子。
- There are other constraint handling techniques such as repairing methods (see a review paper in the reading list) and penalty methods (see a review paper in the reading list). 有其他約束處理技術,例如修復方法(請參閱閱讀清單中的概述論文)和懲罰方法(請叀閱閱讀清單中的概述論文)。
- We have covered numerical constraints only. We have not dealt with constraints in a combinatorial space. 我們只涵蓋了數值約束。我們沒有處理組合空間中的約束。
Further reading 更多閱讀
- T. P. Runarsson, X. Yao, Stochastic ranking for constrained evolutionary optimization, IEEE Transactions on Evolutionary Computation, 4(3):284-294, September 2000.
- T. Runarsson and X. Yao, Search Bias in Constrained Evolutionary Optimization, IEEE Transactions on Systems, Man, and Cybernetics, Part C, 35(2):233-243, May 2005.
- S. He, E. Prempain and Q. H. Wu, An improved particle swarm optimizer for mechanical design optimization problems, Engineering Optimization, 36(5):585-605, 2004
- E. Mezura-Montesa, C. A. Coello Coellob, Constraint-handling in nature-inspired numerical optimization: Past, present and future. Swarm and Evolutionary Computation, 2011