Advanced Edge Detection 高級邊緣檢測
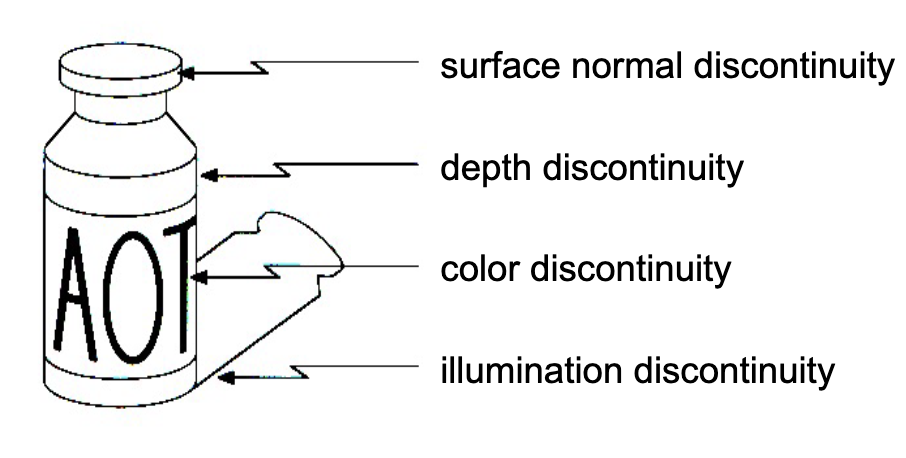
What Causes Intensity Changes? 是什麼導致強度變化?
- Geometric events 幾何事件
- surface orientation (boundary) discontinuities 表面方向(邊界)不連續
- depth discontinuities 深度不連續
- color and texture discontinuities 顏色和紋理不連續
- Non-geometric events 非幾何事件
- illumination changes 照明變化
- specularities 鏡面反射
- shadows 陰影
- inter-reflections 互相反射
Goal of Edge Detection 邊緣檢測的目標
- Produce a line "drawing" of a scene from an image of that scene. 從場景的圖像中產生場景的線條圖。
Why is Edge Detection Useful? 為什麼邊緣檢測有用?
- Important features can be extracted from the edges of an image (e.g., corners, lines, curves). 重要的特徵可以從圖像的邊緣中提取出來(例如,拐角,線,曲線)。
- These features are used by higher-level computer vision algorithms (e.g., recognition). 這些特徵被更高級的電腦視覺算法使用(例如,識別)。
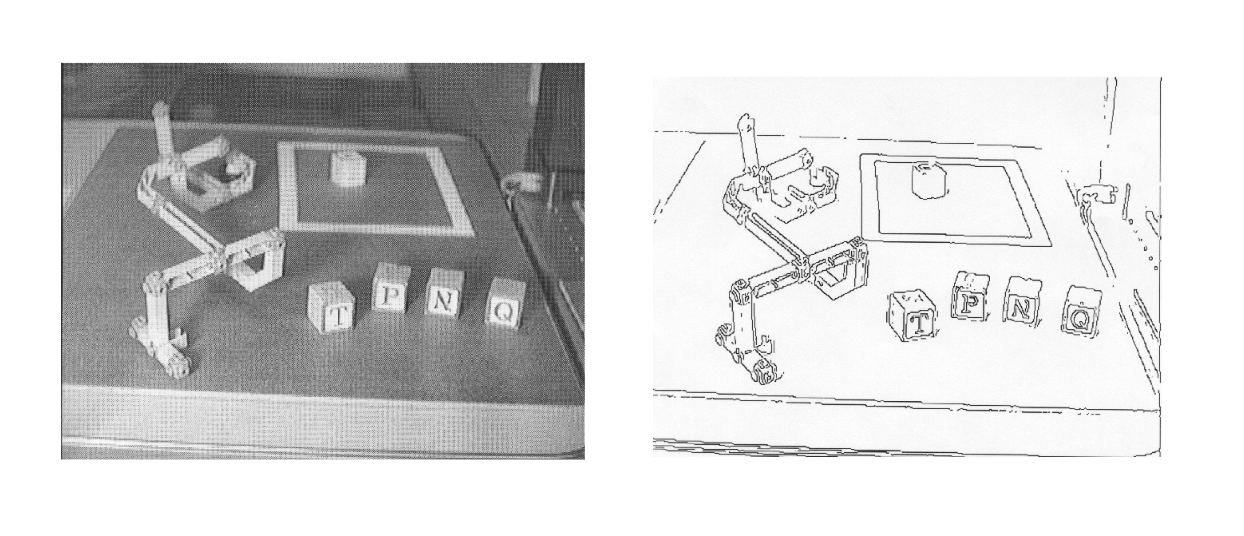
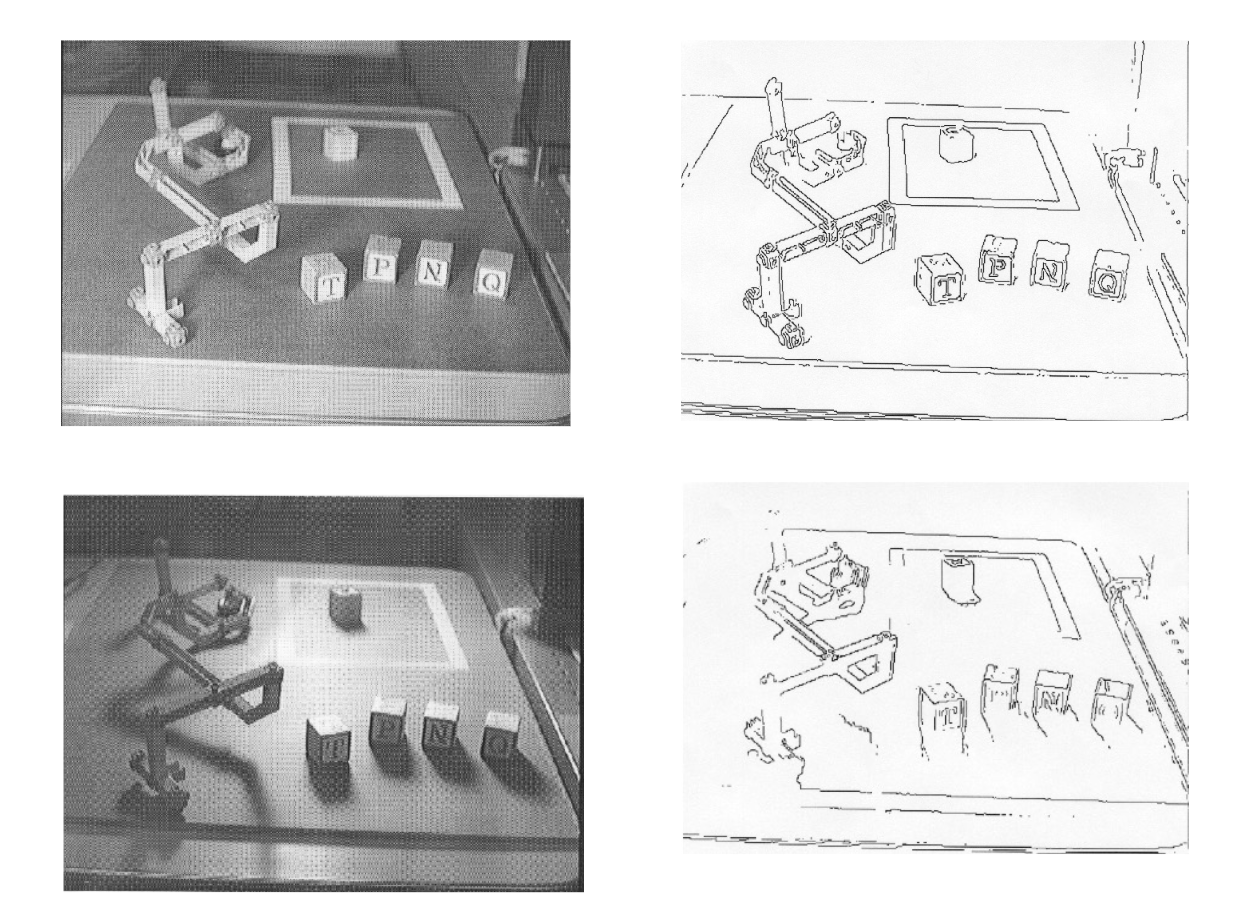
Effect of Illumination 照明效果
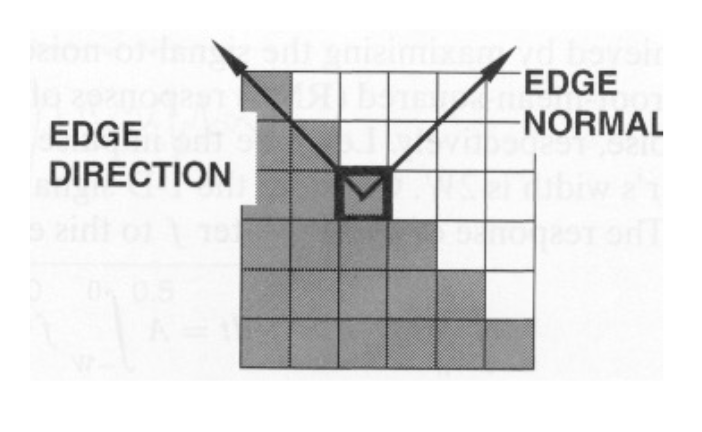
Edge Descriptors 邊緣描述符
Edge direction: perpendicular to the direction of maximum intensity change (i.e., edge normal) 邊緣方向:垂直於最大強度變化的方向(即邊緣法線)
Edge strength: related to the local image contrast along the normal. 邊緣強度:與沿法線的本地圖像對比相關。
Edge position: the image position at which the edge is located. 邊緣位置:圖像位置在邊緣所在的位置。
Main Steps in Edge Detection 邊緣檢測的主要步驟
- Smoothing: suppress as much noise as possible, without destroying true edges. 平滑:盡可能減少噪聲,而不破壞真實的邊緣。
- Enhancement: apply differentiation to enhance the quality of edges (i.e., sharpening). 增強:應用差分增強邊緣的質量(即銳化)。
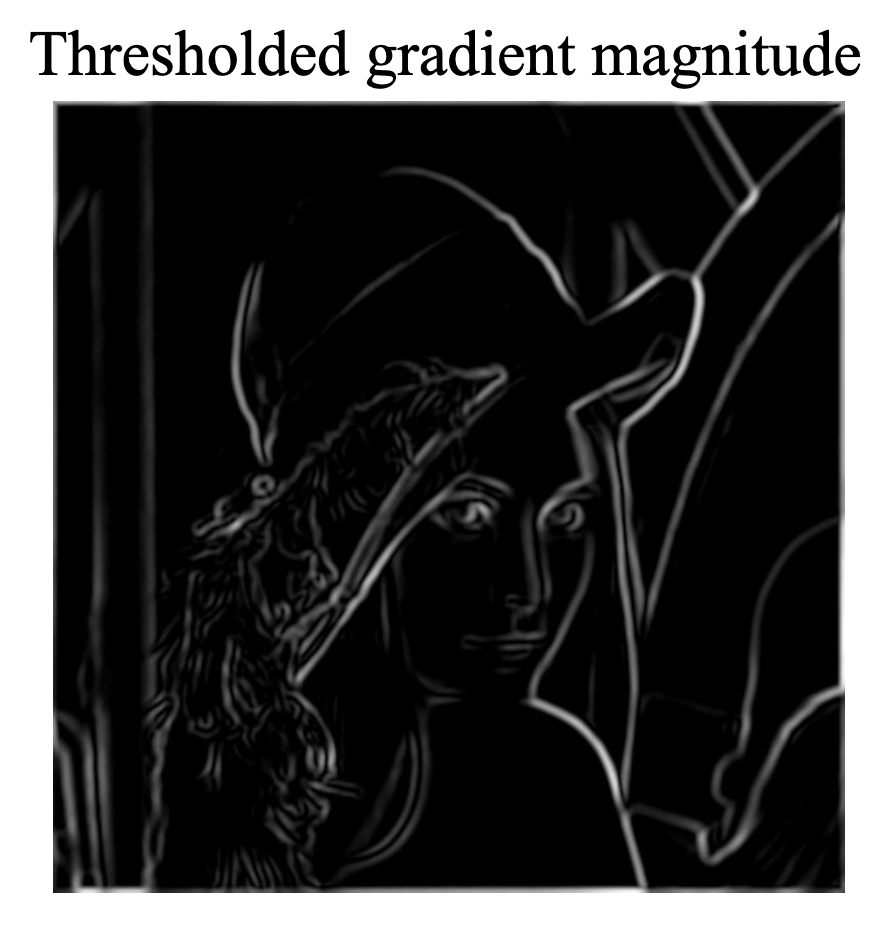
- Thresholding: determine which edge pixels should be discarded as noise and which should be retained (i.e., threshold edge magnitude). 閾值:確定哪些邊緣像素應該被丟棄為噪聲,哪些應該被保留(即閾值邊緣幅度)。
- Localization: determine the exact edge location. 定位:確定精確的邊緣位置。
sub-pixel resolution might be required for some applications to estimate the location of an edge to better than the spacing between pixels. 對於某些應用程序,可能需要子像素分辨率以估計邊緣的位置,以比像素之間的間距更好。
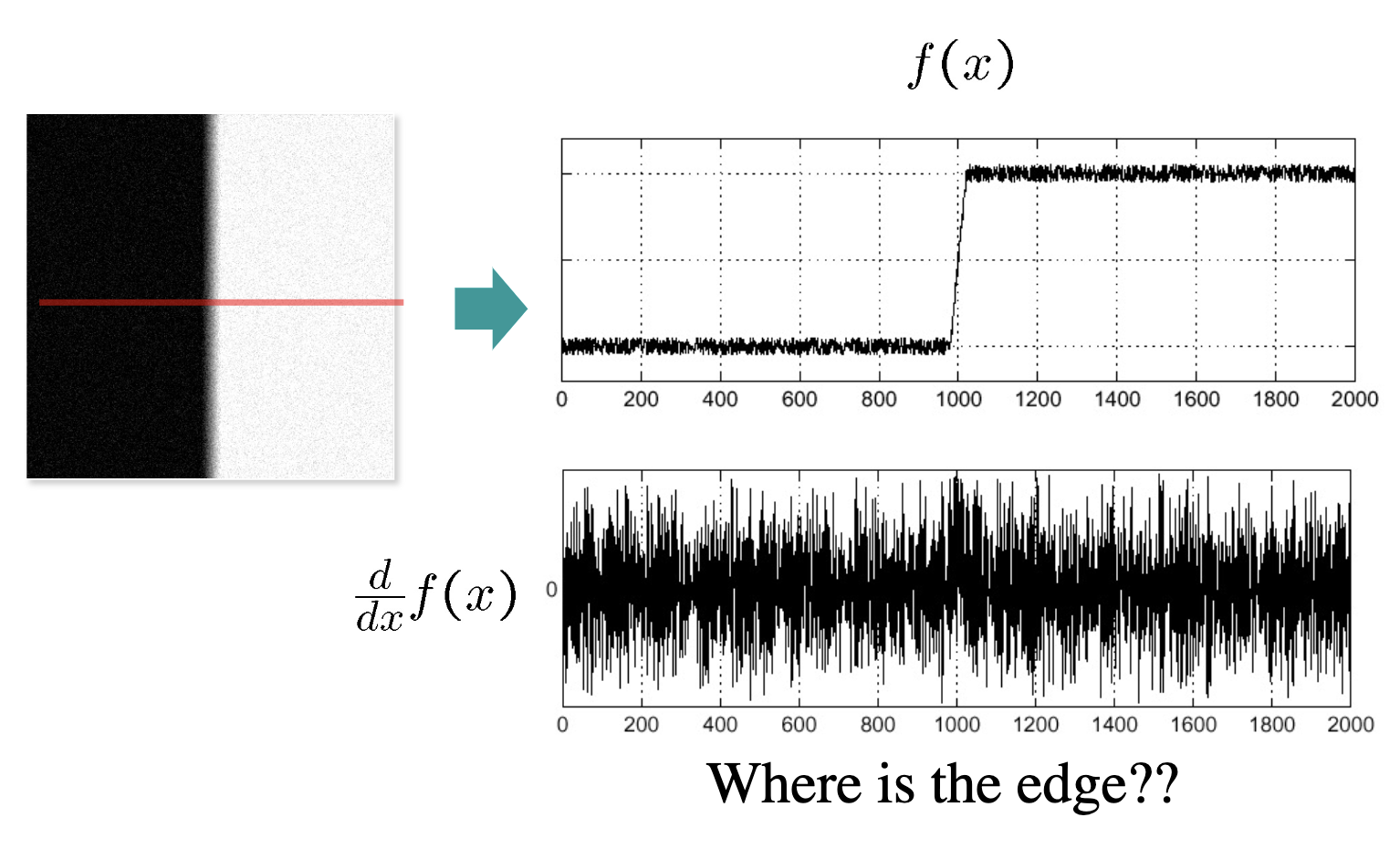
Edge Detection Using Derivatives 使用微分的邊緣檢測
- Often, points that lie on an edge are detected by: 通常,位於邊緣上的點通過以下方式檢測:
- Detecting the local maxima or minima of the first derivative. 檢測第一個微分的局部最大值或最小值。
- Detecting the zero-crossings of the second derivative. 檢測第二個微分的零交點。
Effect Smoothing on Derivates 平滑對微分的影響
Effect of Smoothing on Derivatives (cont'd) 平滑對微分的影響(繼續)
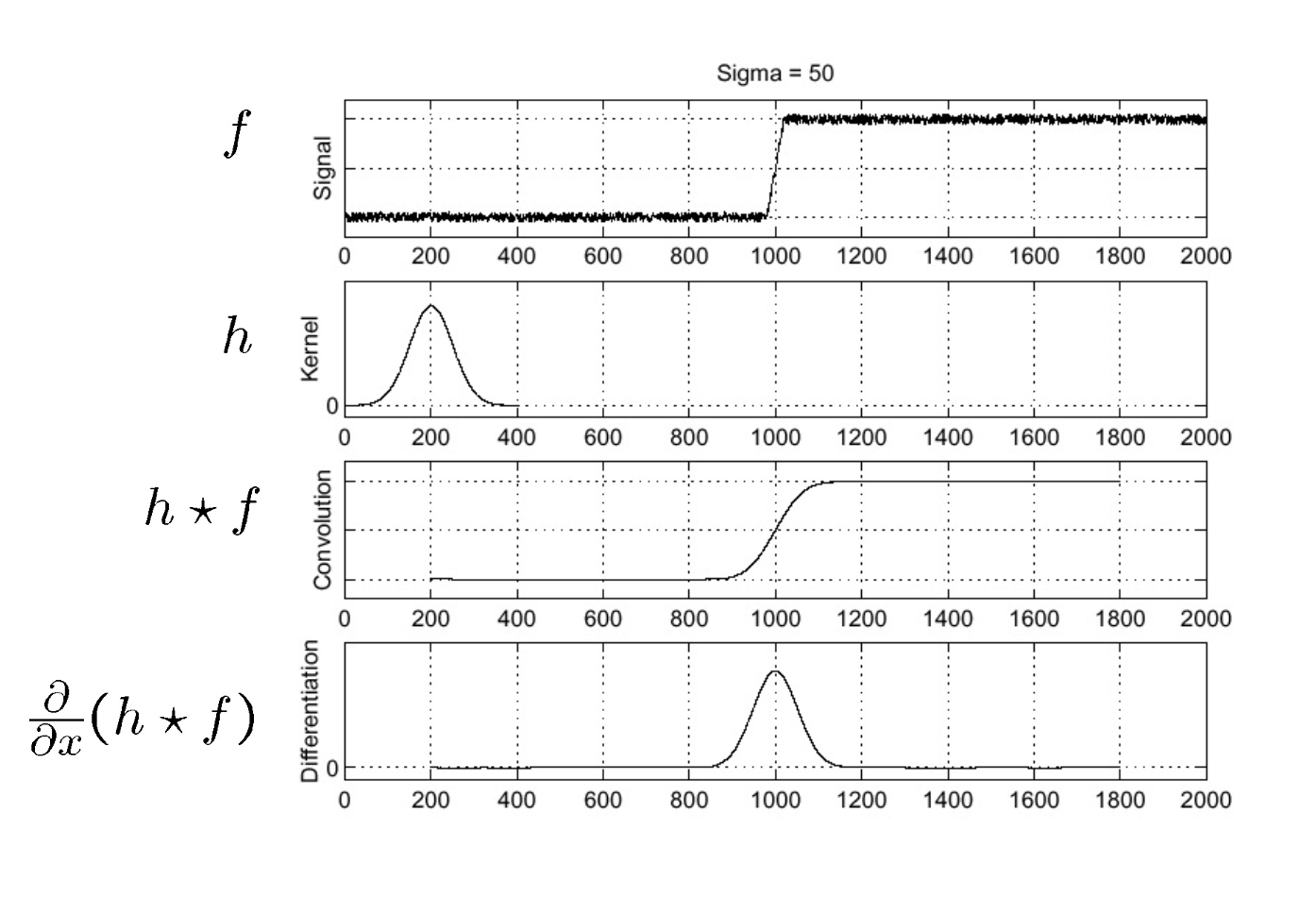
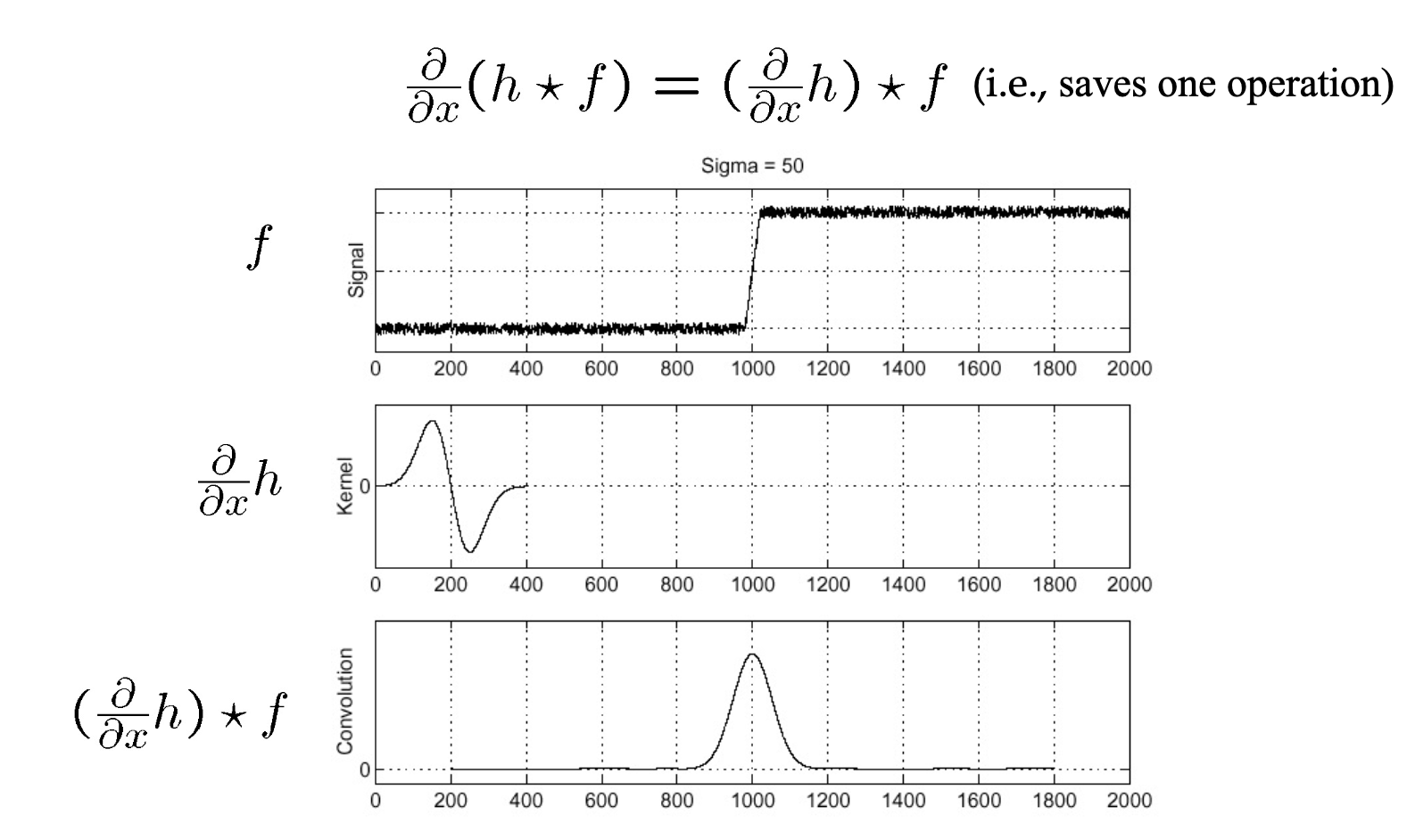
Combine Smoothing with Differentiation 將平滑與微分結合
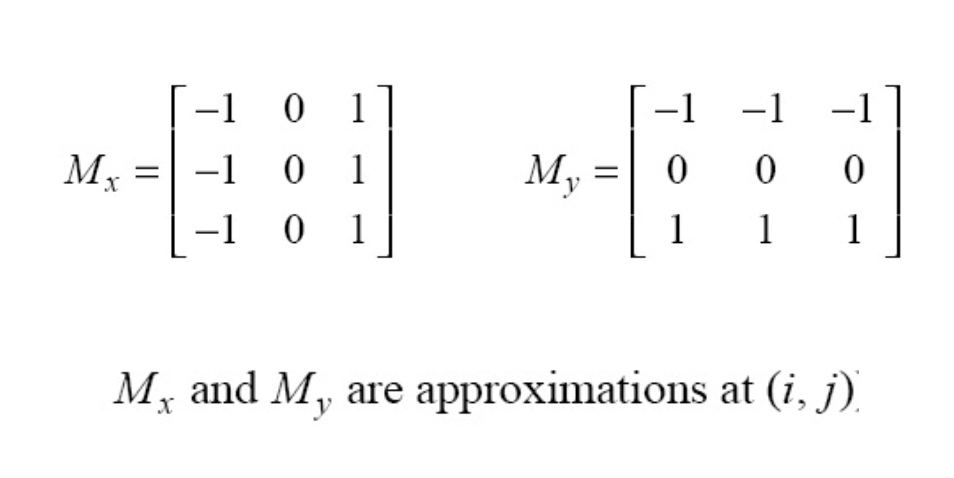
Prewitt Operator 約翰·普維特算子
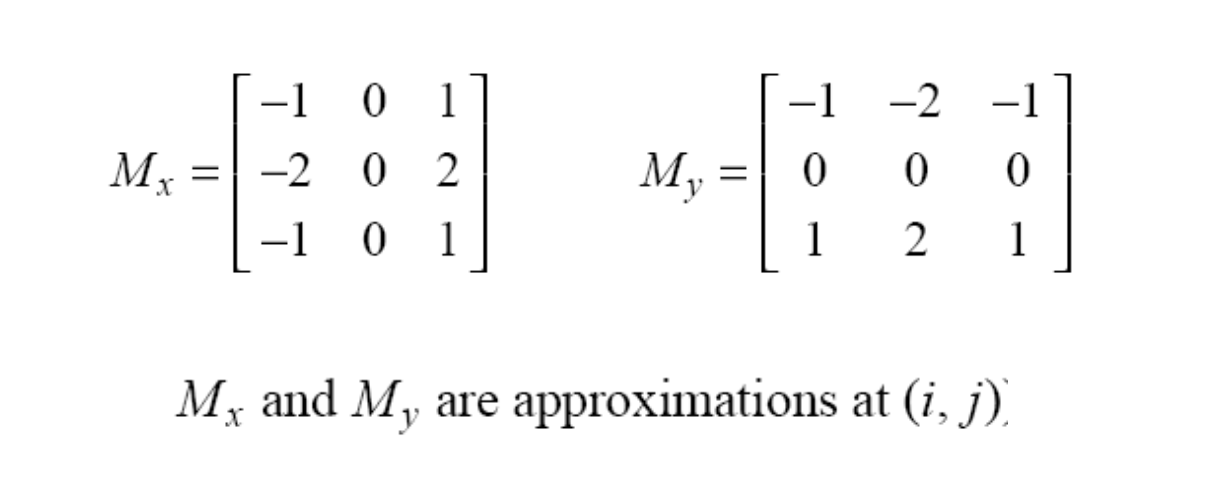
Sobel Operator 索貝爾算子
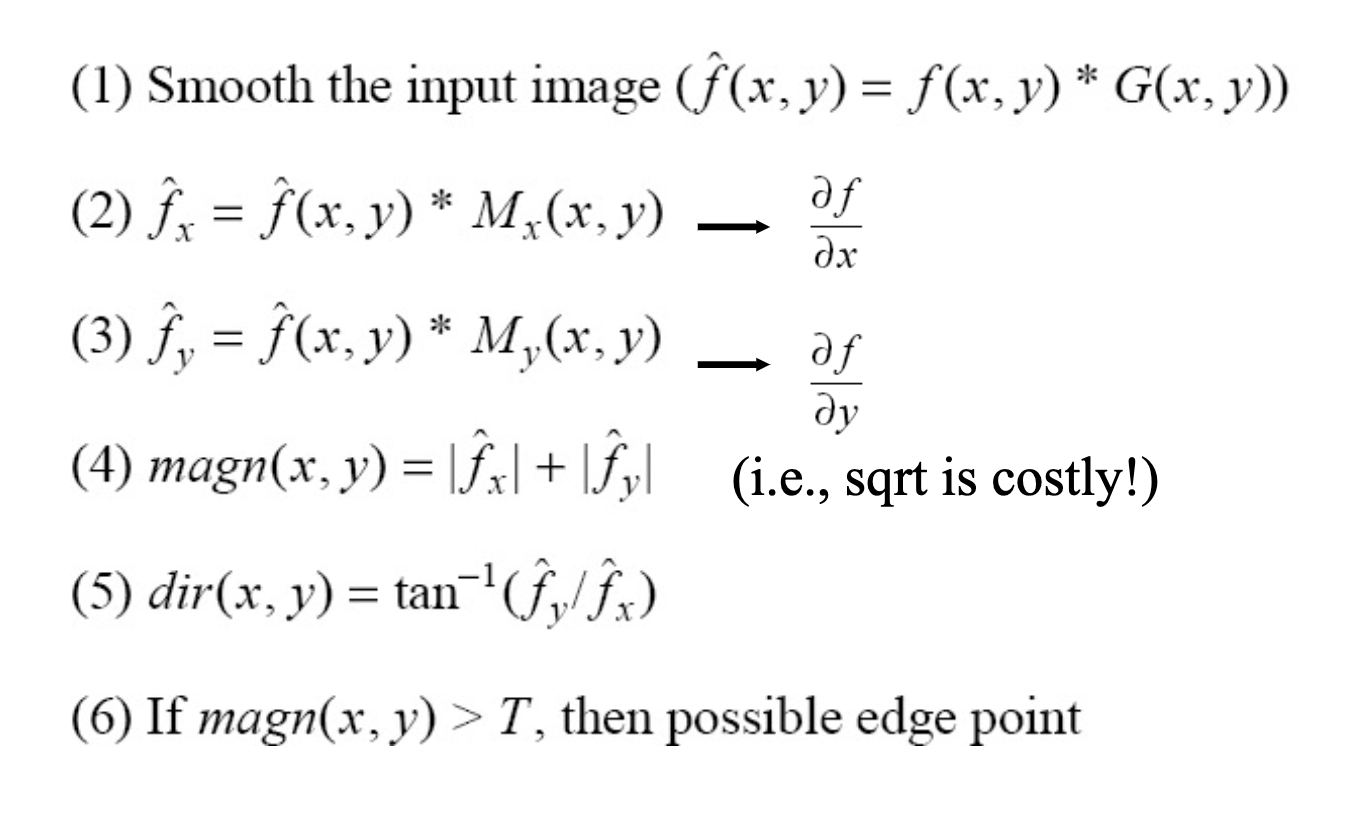
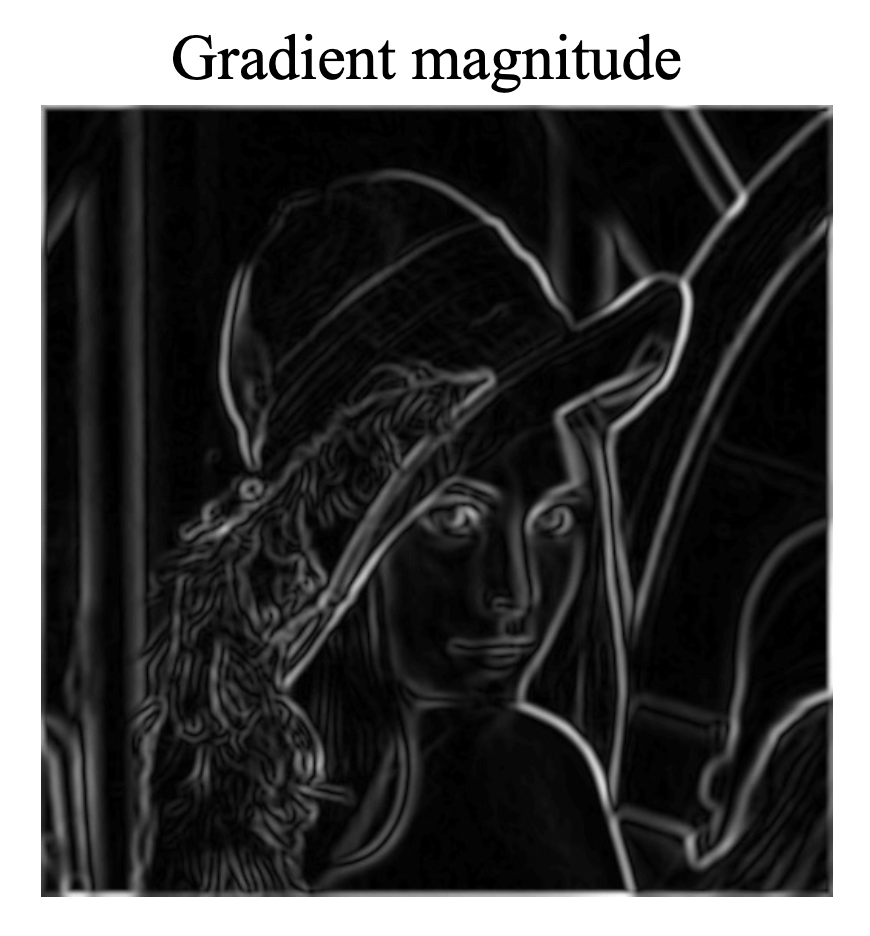
Edge Detection Steps Using Gradient 使用梯度的邊緣檢測步驟
Practical Issues 實際問題
- Noise suppression-localization tradeoff. 噪聲抑制-定位權衡。
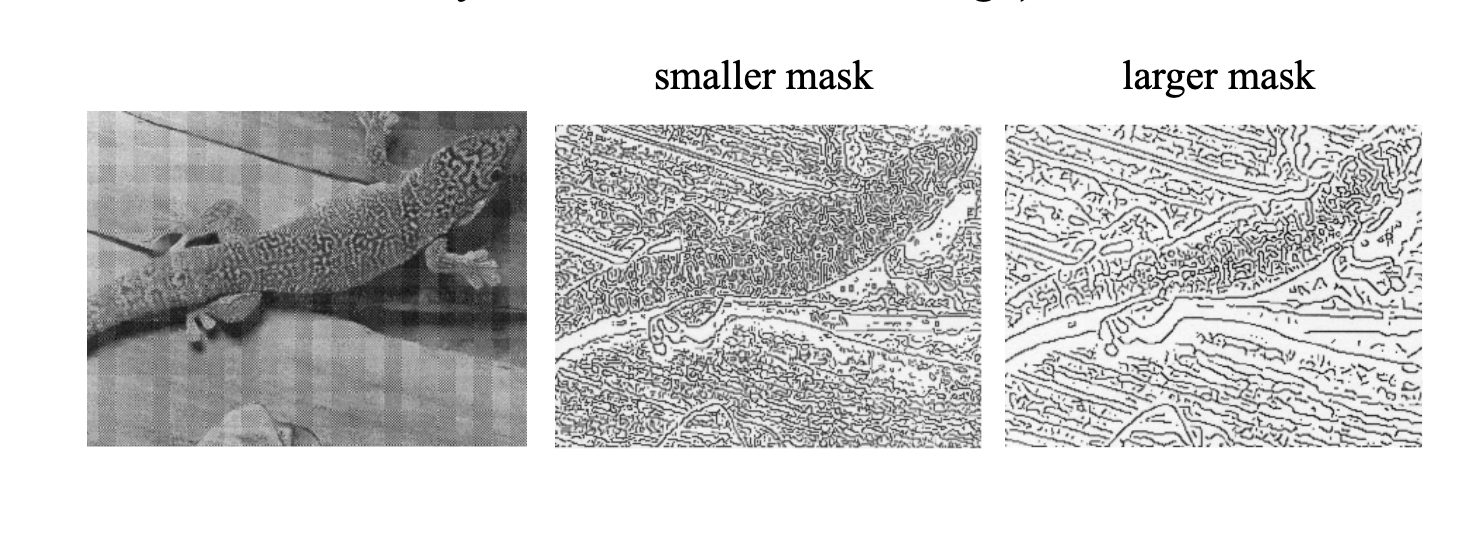
- Smoothing depends on mask size (e.g., depends on σ for Gaussian filters). 平滑取決於掩模大小(例如,取決於高斯濾波器的 σ)。
- Larger mask sizes reduce noise, but worsen localization (i.e., add uncertainty to the location of the edge) and vice versa. 較大的掩模大小可減少噪聲,但會使定位變差(即增加邊緣位置的不確定性),反之亦然。
Practical Issues (cont'd) 實際問題(繼續)
- Choice of threshold. 閾值的選擇。
Criteria for Optimal Edge Detection 邊緣檢測的最佳條件
- Good detection 良好的檢測
- Minimize the probability of false positives(i.e., spurious edges). 最小化誤報的概率(即虛假邊緣)。
- Minimize the probability of false negatives(i.e., missing real edges). 最小化誤報的概率(即遺漏真實邊緣)。
- Good localization 好的定位
- Detected edges must be as close as possible to the true edges. 檢測到的邊緣必須盡可能接近真實邊緣。
- Single response 單一回應
- Minimize the number of local maxima around the true edge. 最小化真實邊緣周圍的局部最大值的數量。
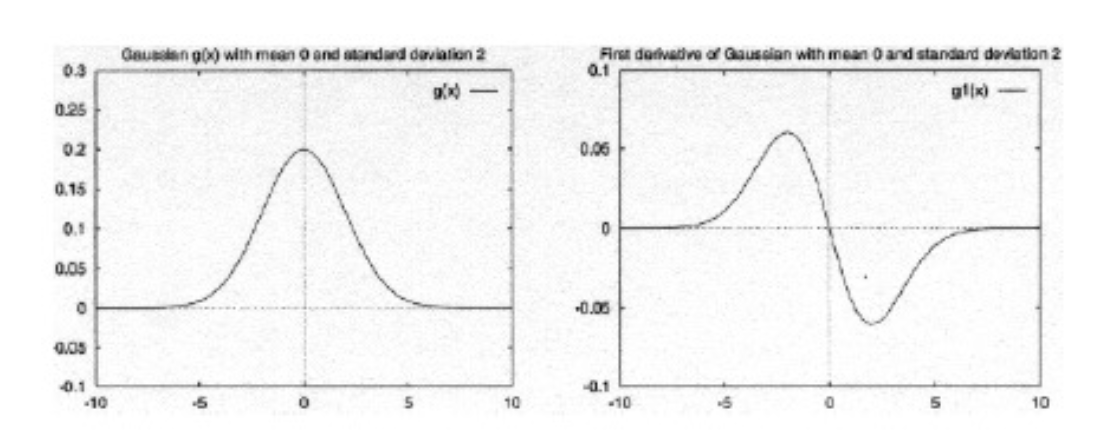
Canny edge detector Canny 邊緣檢測器
- Canny has shown that the first derivative of the Gaussian closely approximates the operator that optimizes the product of signal-to-noise ratio and localization. (i.e., analysis based on "step-edges" corrupted by "Gaussian noise") Canny 顯示,高斯的第一個微分近似地近似了優化 信號與噪聲 比率和定位的算子。 (即基於"步邊緣"並受到"高斯噪聲"損壞的分析)
J. Canny, A Computational Approach To Edge Detection , IEEE Trans. Pattern Analysis and Machine Intelligence, 8:679-714, 1986.
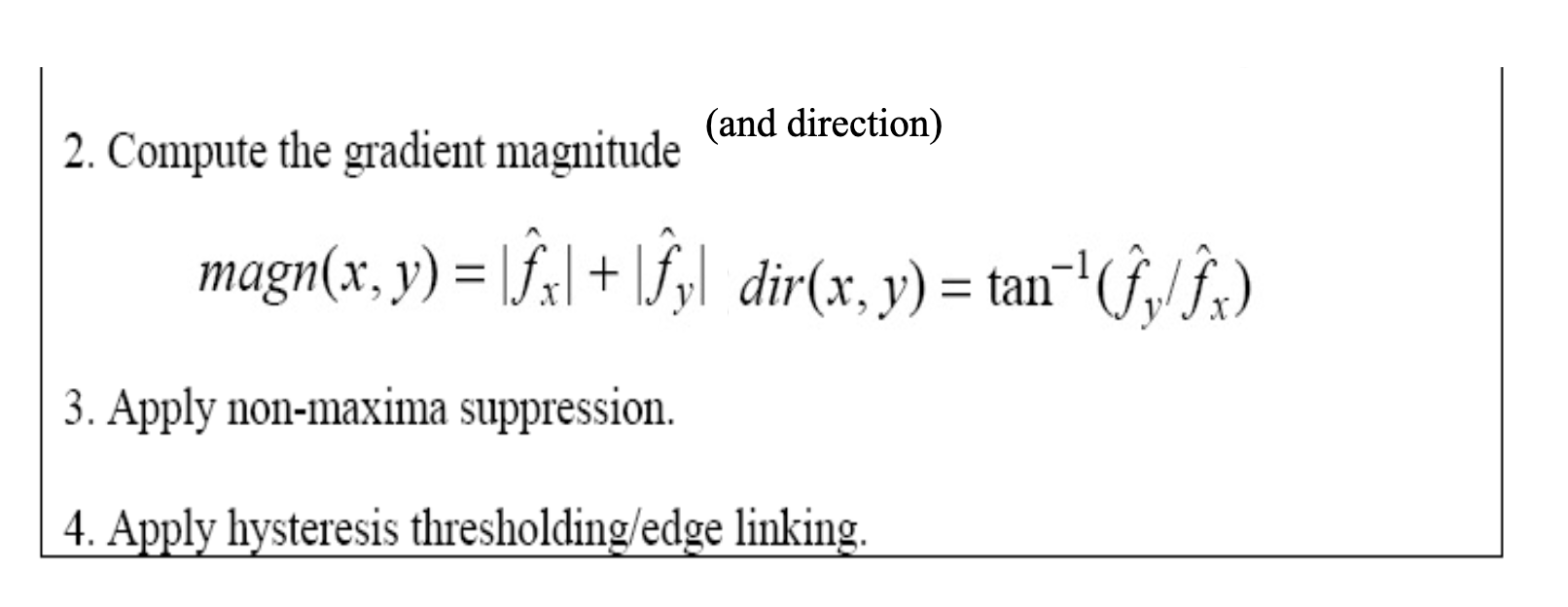
Steps of Canny edge detector Canny 邊緣檢測器的步驟
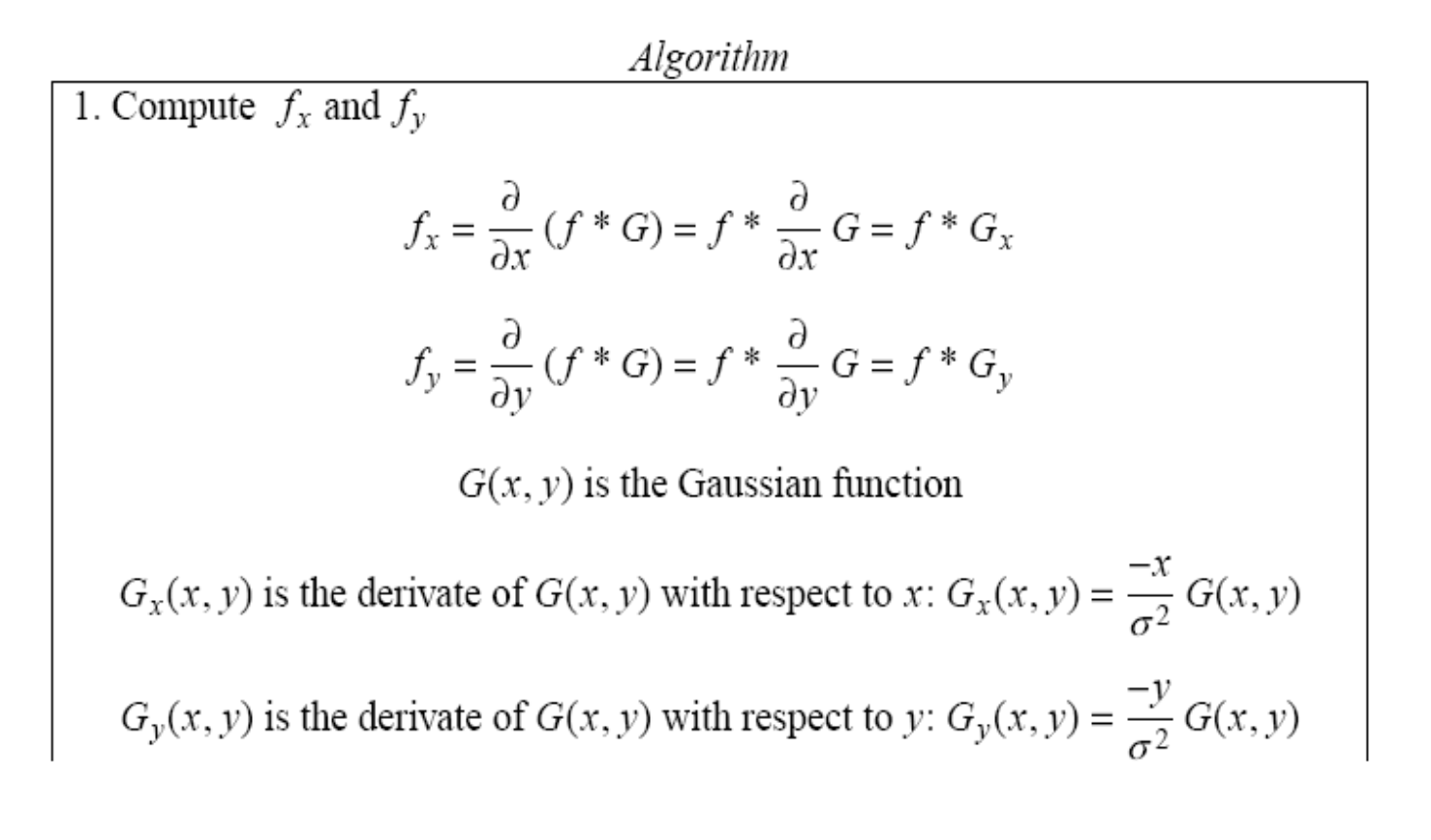
Steps of Canny edge detector (cont'd) Canny 邊緣檢測器的步驟(繼續)
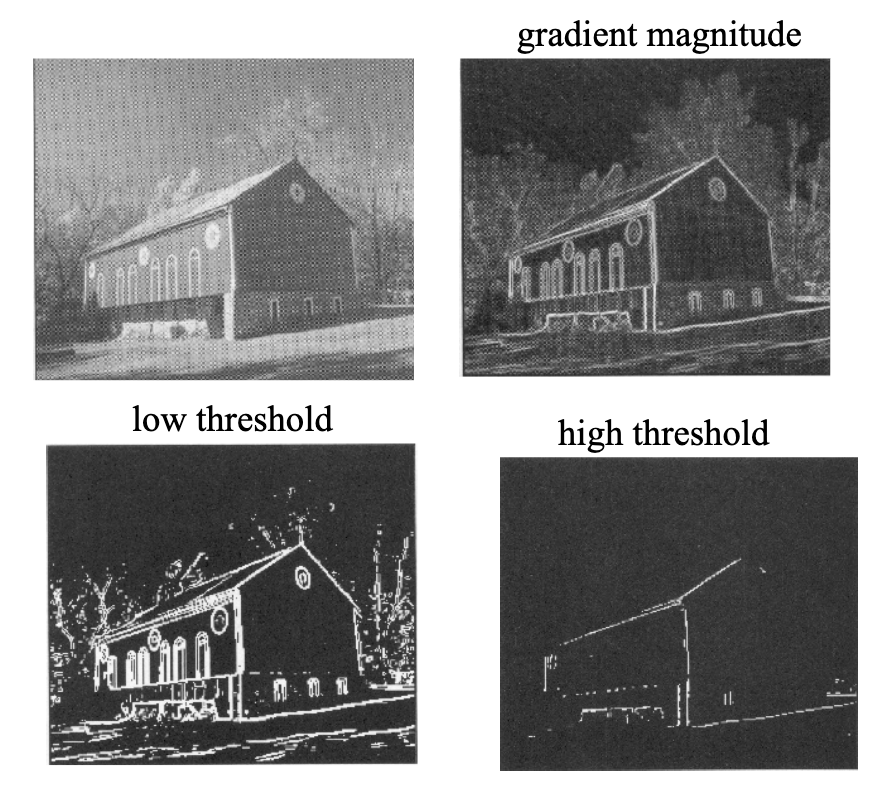
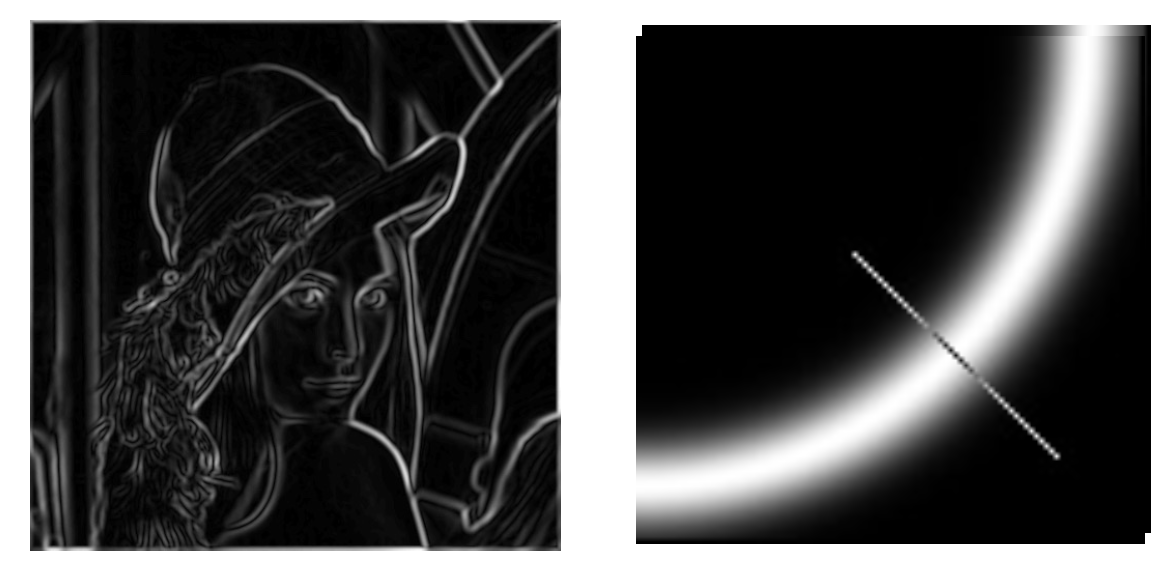
Canny edge detector - example Canny 邊緣檢測器 - 例子
Canny edge detector – example (cont'd) Canny 邊緣檢測器 - 例子(繼續)
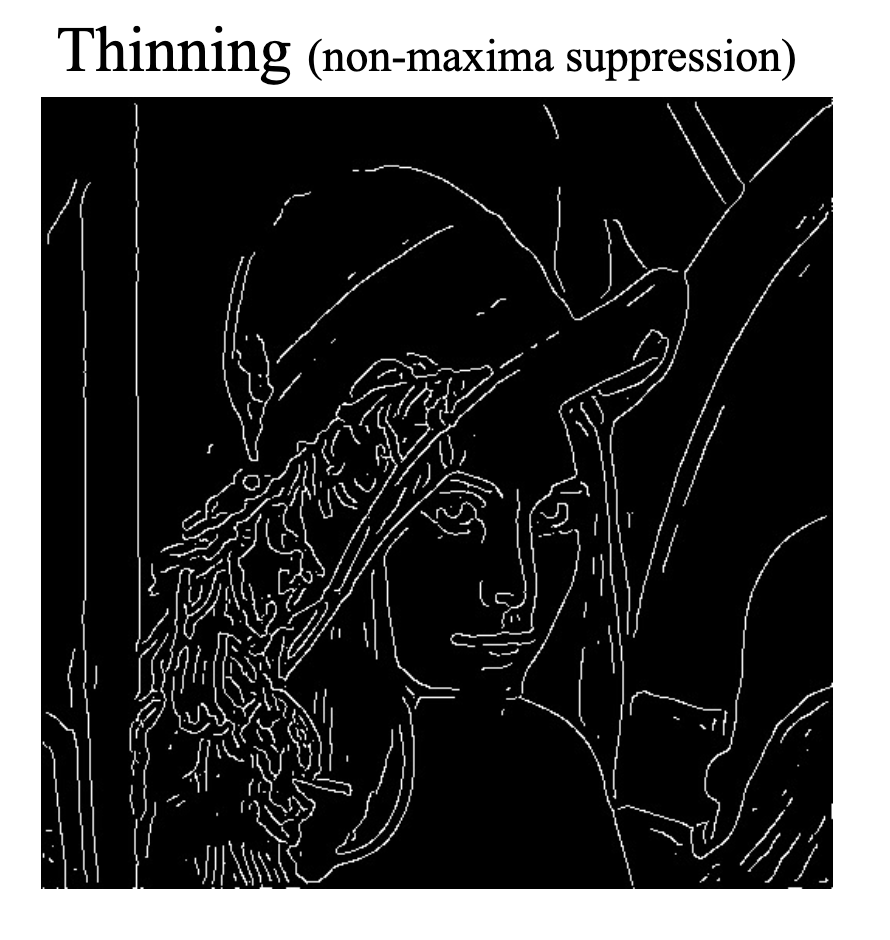
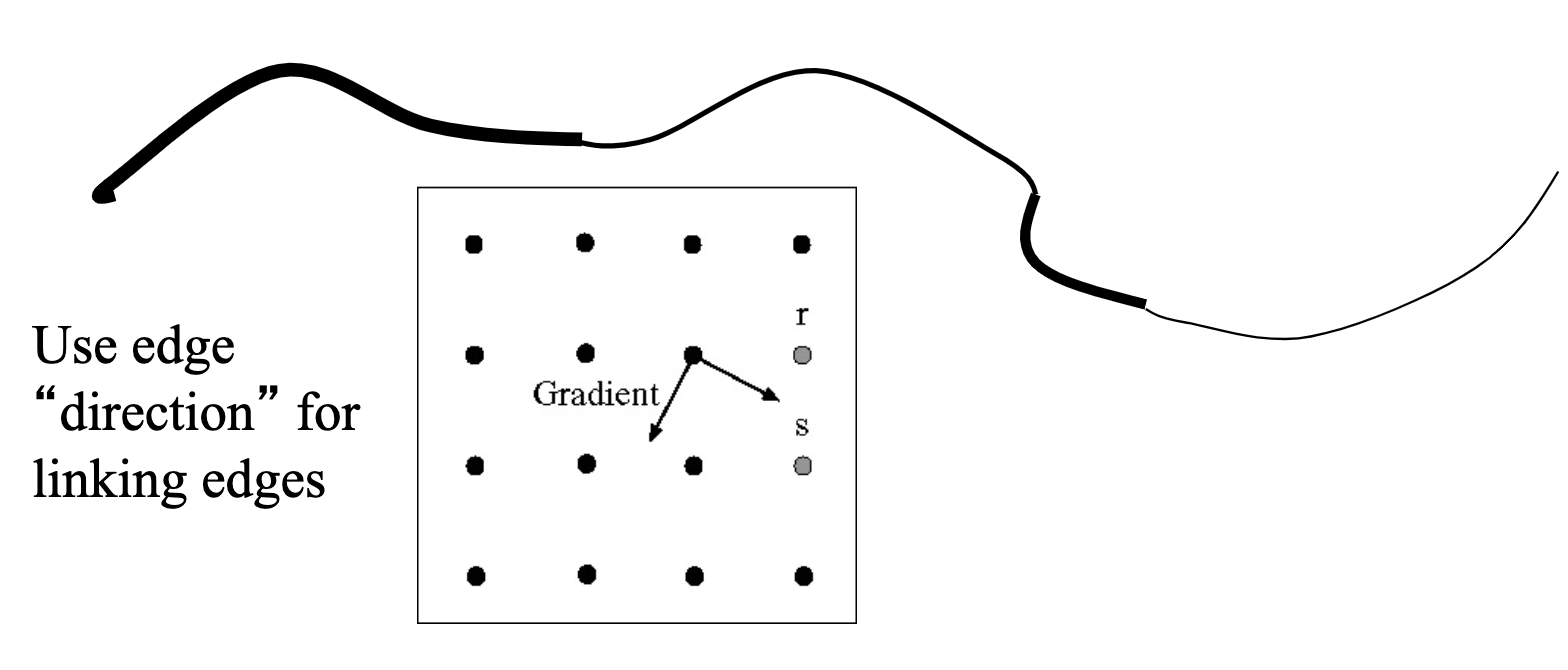
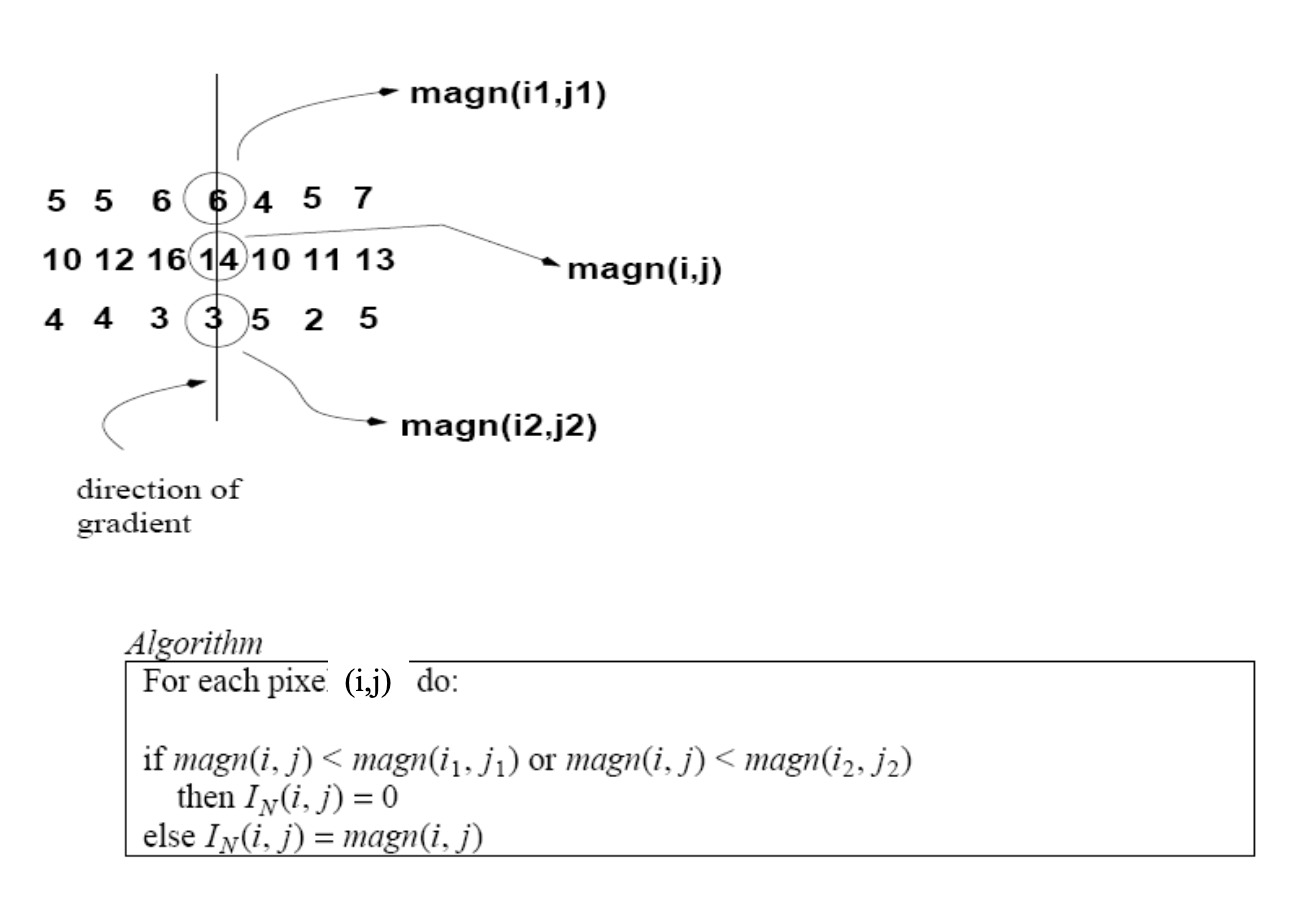
Non-maxima suppression 非最大值抑制
- Check if gradient magnitude at pixel location (i,j) is local maximum along gradient direction 檢查像素位置 (i,j) 的梯度幅值是否為沿梯度方向的局部最大值
Non-maxima suppression (cont'd) 非最大值抑制(繼續)
Hysteresis thresholding 閾值連接
Standard thresholding: 標準閾值
- Can only select "strong" edges. 只能選擇"強"邊緣。
- Does not guarantee "continuity". 不保證"連續性"。
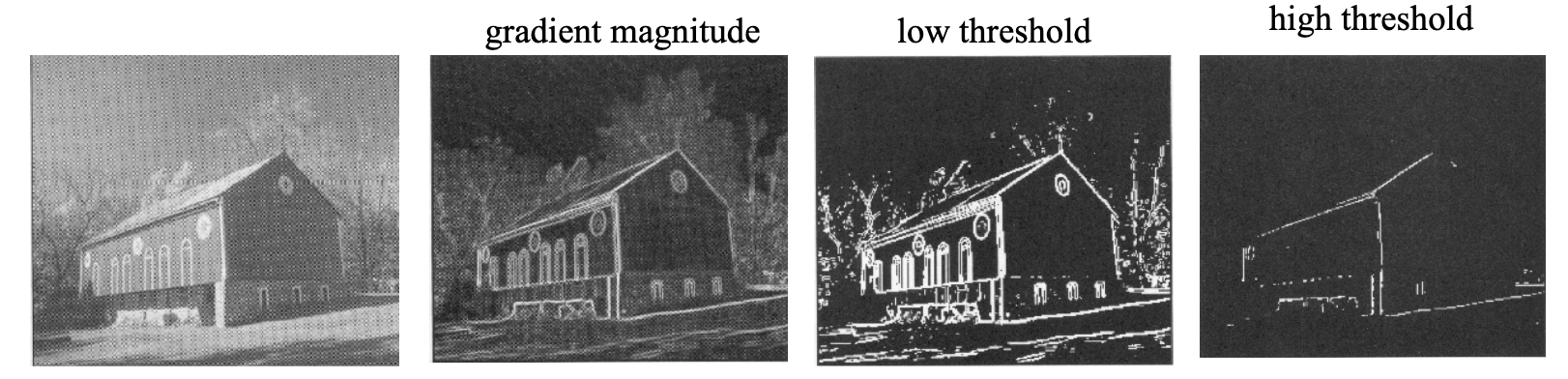
Hysteresis thresholding (cont'd) 閾值連接(繼續)
- Hysteresis thresholding uses two thresholds: 閾值連接使用兩個閾值:
- low threshold tl
- high threshold th( usually, th = 2 tl)
- For "maybe" edges, decide on the edge if neighboring pixel is a strong edge. 對於"可能"邊緣,如果鄰近像素是強邊緣,則決定邊緣。
Hysteresis thresholding/Edge Linking 閾值連接/邊緣連接
Idea: use a high threshold to start edge curves and a low threshold to continue them. 概念:使用高閾值來開始邊緣曲線,並使用低閾值來繼續它們。